Overview¶
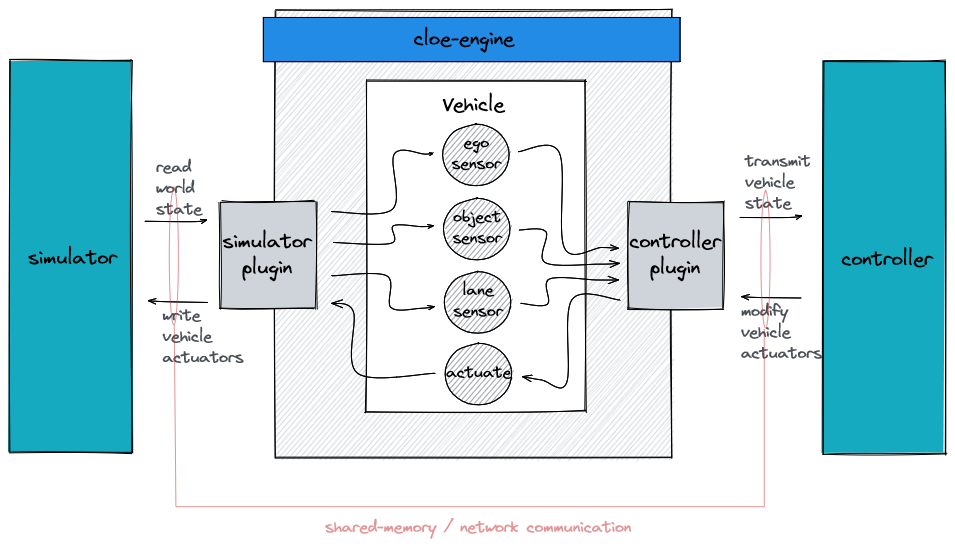
Cloe consists of multiple components that work together to create a system simulation. The most significant of these are the simulator binding, the vehicle, the controller binding and the core of Cloe itself. Each of these will be described in detail.
Simulator (Binding)¶
A simulator in which vehicles are driven can vary greatly in complexity. It can use simple or complex models, which have significant effect on the result of any simulation performed. Two important aspects to any simulator for vehicles are how environment and vehicles are modelled:
Vehicle model complexity determines how the vehicle model in the simulation applies values we supply to the drivetrain and the steering system.
Environment physics determine how the vehicle acts on the driving surface and how the vehicle’s sensing system perceives other players.
In order to accommodate different use-cases, Cloe attempts to abstract over the differences of simulators by providing a high-level interface to a minimum set of features. The component in a simulation that interfaces with a simulator is called the simulator or simulator binding.
Cloe currently provides three simulator bindings:
- vtd
Interfaces with Vires VTD, which excels in scenario creation and manipulation, as well as visualization. A paid license is required to use VTD.
- minimator
A simulator binding that provides very minimal data, mainly to serve as a stand-in for when other simulators are not available.
- nop
A simulator binding that does absolutely nothing and provides no data, but can serve as a stand-in when no other simulator is available. This is a built-in simulator.
- …
With time, we expect more simulator bindings to be implemented and included. In particular, we would be happy to have bindings to open source simulators. In the future, a basic simulator may even be included within Cloe itself.
The simulator binding provides Cloe with a set of vehicles within a scenario that Cloe can access. The primary way that Cloe interacts with the simulator is through the vehicles, by reading from sensors and writing to actuators.
Vehicles¶
A vehicle is one of the central abstractions provided by Cloe. Each vehicle is somehow represented in a virtual scenario, which is provided by the simulator.
Vehicle Components¶
A vehicle contains multiple components [1], which can be used to observe or modify the vehicle in the virtual scenario.
Generally, the following classes of components can be assumed to exist in a vehicle:
- ego sensor
Provides information about the host vehicle itself, such as position, velocity, and acceleration.
- world sensor
Provides a view of the world from the perspective of the host vehicle. Usually, the output of a world sensor is a list of objects. These objects contain properties, such as type, position, velocity, and acceleration. They may also be augmented with type specific information.
- lane sensor
Provides information on the lanes in the road that is currently being driven on by the host vehicle.
- actuator
Provides an interface with which one can write desired acceleration and steering angle into. These are then used by the simulator to modify the vehicles trajectory.
- …
Components may be installed into the vehicle by the simulator binding, the controller, and the Cloe executer. The interface requirements for a component are quite minimal.
Some of these components are also available in groundtruth variants, others are simply available in different forms. In particular, there may be different kinds of actuators, and sensing the world may be provided in sensor-specific ways, such as with a video-feed or with radar objects.
The bindings may take advantage of standard vehicle components that are defined in the core Cloe library, especially in order to fulfill certain expected programmatic interfaces.
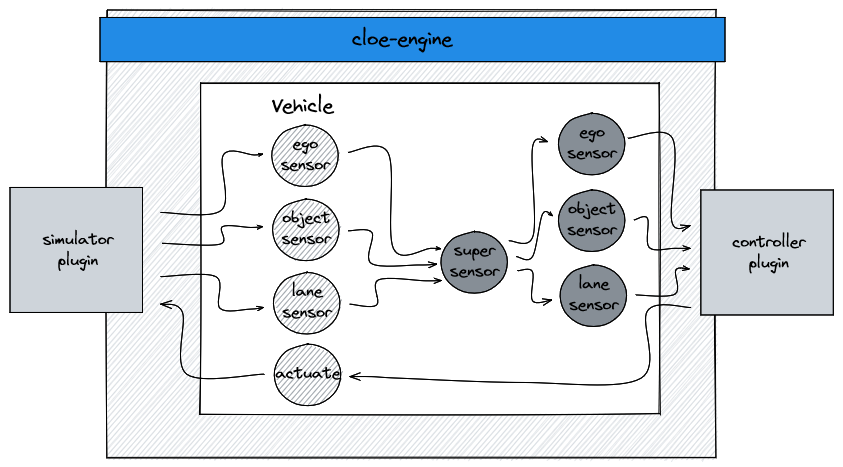
Component Proxies¶
Because one of the goals of Cloe is to scale simulation up in speed and breadth, it is not feasible to simulate the entire signal processing pipeline. Instead, we start with perfect knowledge derived from the virtual scenario and provide views to this perfect knowledge that is phenomenological.
For example, instead of simulating a radar, which would require highly detailed environment models coupled with ray-tracing, we apply phenomenological effects on the perfect objects that are read from the world sensor provided by the simulator: ghosting, object duplication and merging, etc.
The benefit of using standard components is that it is possible to apply proxies to these components that provide useful features. These proxy components need to only fulfill the basic standard interface, and so could be combined in a plethora of ways.
For example, let the world sensor fulfill the object sensor interface. Further, let there be a class of object sensor filters that also fulfill the object sensor interface, but require any other object sensor in order to be constructed. A simple filter could discard 5% of its objects; it would do this by first reading from the underlying object sensor, copying all the objects into a local cache, and removing 5%. This filter would be constructed with the original default world sensor and then take its place. Any successive access to the default world sensor would then access the simple filter in its stead. And in this way, we have already provided a phenomenological effect to the otherwise perfect sensor. This technique could naturally be combined with other filters.
Controller (Binding)¶
In Cloe, the system-under-test is usually a controller. This can be seen as an independent agent that is combined with a vehicle. The controller can read and write to the components in a vehicle. Because almost all interesting controllers are external to Cloe, we also speak of a controller binding as the instance that interfaces with Cloe.
A vehicle can have multiple controllers attached to it, but a controller can only be attached to a single vehicle (this makes for a 1-n relationship). This allows for a very modular approach to controllers, which promotes simplicity and reusability.
Cloe provides several controllers:
- nop
A controller that does absolutely nothing, but can serve as a stand-in when required.
- basic
A prototypical ACC, LKA, and AEB in one. As the name indicates, the algorithms contained in this controller are quite basic, and exist primarily to test Cloe itself or as a proof-of-concept.
- demo_printer
Proof-of-concept controller that prints various messages to the console or a file. Currently barely implemented and only used for debugging.
- demo_stuck
Test controller that slows and stops progressing at pre-configured points during the simulation. Used for testing Cloe.
- gndtruth_extractor
A controller that dumps sensor data into files.
- virtue
Online testing of invariants and assumptions that we make on the vehicle and the simulator as can be seen from the perspective of the host vehicle.
Other controllers that make sense to provide with Cloe (but have not been implemented yet) are:
- player
Direct human control of a vehicle via the keyboard or joystick. This could be useful for testing other controllers by attaching it to another vehicle in the simulation.
- recorder
Storing observed events persistently for offline analysis or for verification purposes. For example, the reproducibility of the entire simulation from the perspective of the vehicle could be ascertained.
Cloe¶
Cloe apart from the above external components consists of the Cloe Runtime, and the Cloe Web UI. These are fully provided by the Cloe development team.
Runtime / Core / Engine¶
The core of Cloe is a library (libcloe.so and libcloe.a) and an
executable (cloe-engine), with the following parts:
- engine
Interprets configuration, loads all the rest of the components into one coherent simulation. Runs the simulation loop for loop, triggering each component at the correct time, maintaining the simulation invariants all the while.
- server
A JSON REST API is provided over an embedded web server. Every component that is part of the simulation can expose an API. These endpoints are primarily used by the web UI, but anyone can write a program to access them.
- runtime
The collection of header files and object files that are required to compile a controller binding or simulator binding for Cloe. This also includes the Cloe library.
Web User Interface¶
A separate web UI, based on React.js, connects to the JSON REST API provided by Cloe. This allows users to interact with the simulation and the controllers from their web browser. This is particularly valuable when running simulations in a distributed environment.
The web UI provides (or could provide) the following main features:
An overview of the simulation.
Simple simulation controls, such as simulation speed.
Graphical access to controller HMI controls.
Basic graphs and statistics of the simulation.
Basic rendering of the virtual scenario.